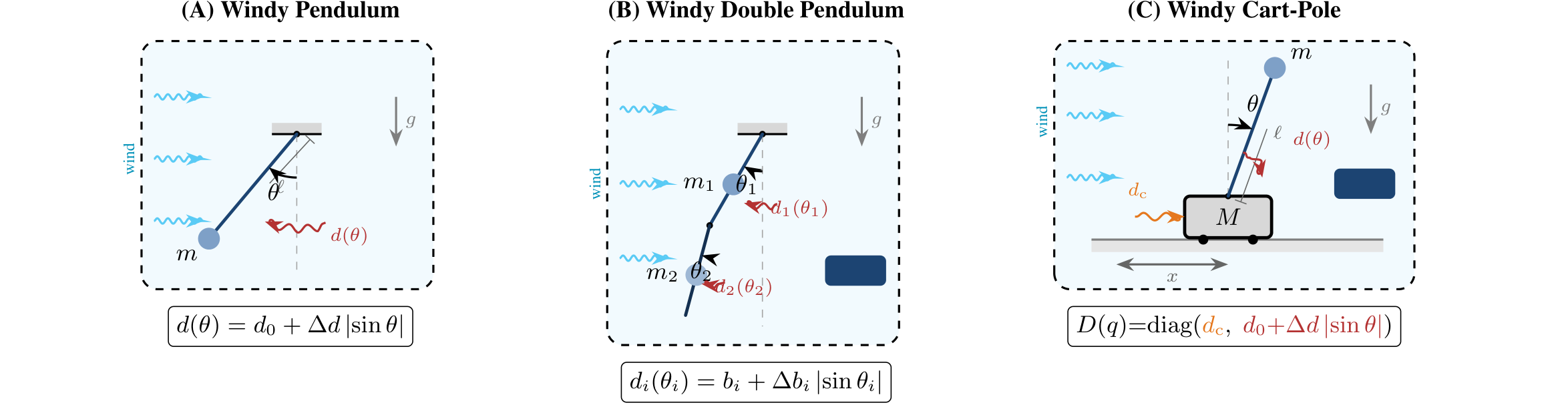
These three systems form a progression of structural complexity: Windy Pendulum (1-DOF, scalar damping $d(\theta)$), Double Pendulum (2-DOF chain with configuration-dependent mass $M(q)$), and Cart-Pole (mixed topology $\mathbb{R} \times S^1$, per-DOF damping with two distinct mechanisms: constant cart friction $d_c$ and position-dependent angular wind damping $d(\theta)$).
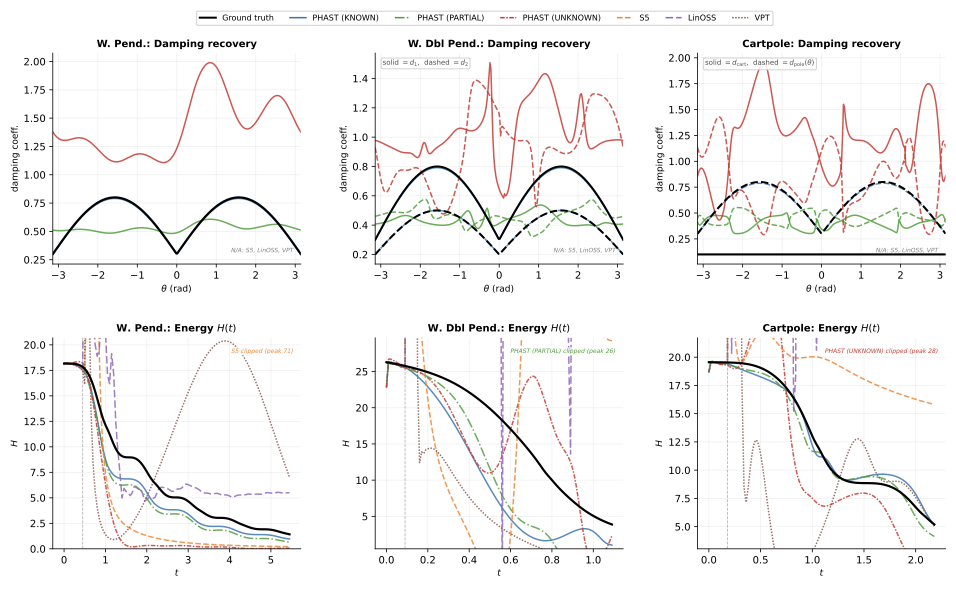
A model that forecasts well need not recover the true physics—damping $D(q)$ can act as a “stabilizer” absorbing errors in $V$ or $M$, making the inverse problem non-identifiable without sufficient structure. PHAST exposes this via two evaluation axes:
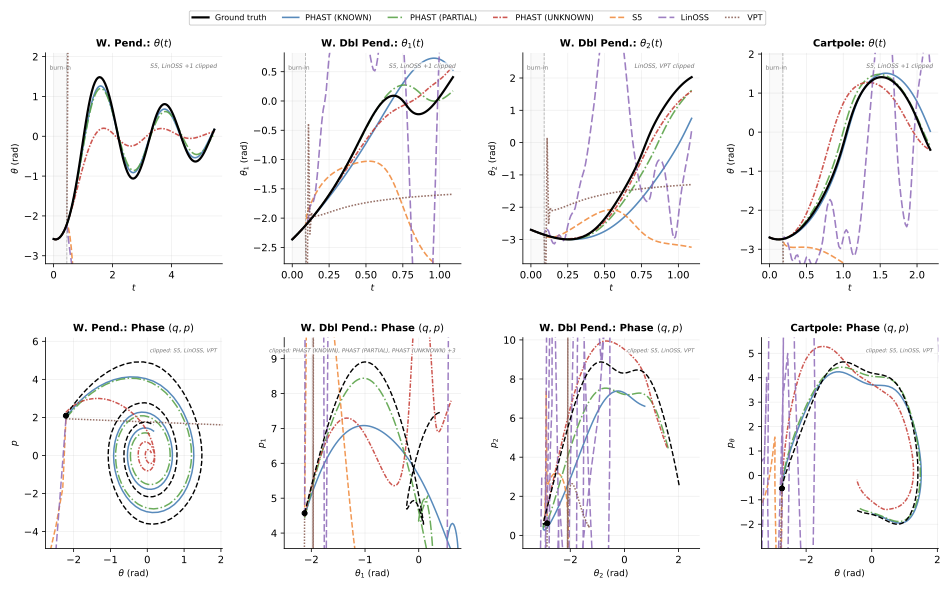
- Forecasting — rollout MSE at $H{=}100$: PHAST (PARTIAL) achieves the best forecasting across all three systems
- Identifiability — damping $R^2_D$ vs. ground truth: PHAST (KNOWN) achieves near-perfect recovery ($R^2_D \approx 1$) on Pendulum and Double Pendulum
Baselines (S5, LinOSS, VPT) do not expose explicit damping fields—they can forecast, but cannot tell you why the system dissipates.